

🧩 核心概念#
系统架构概述#
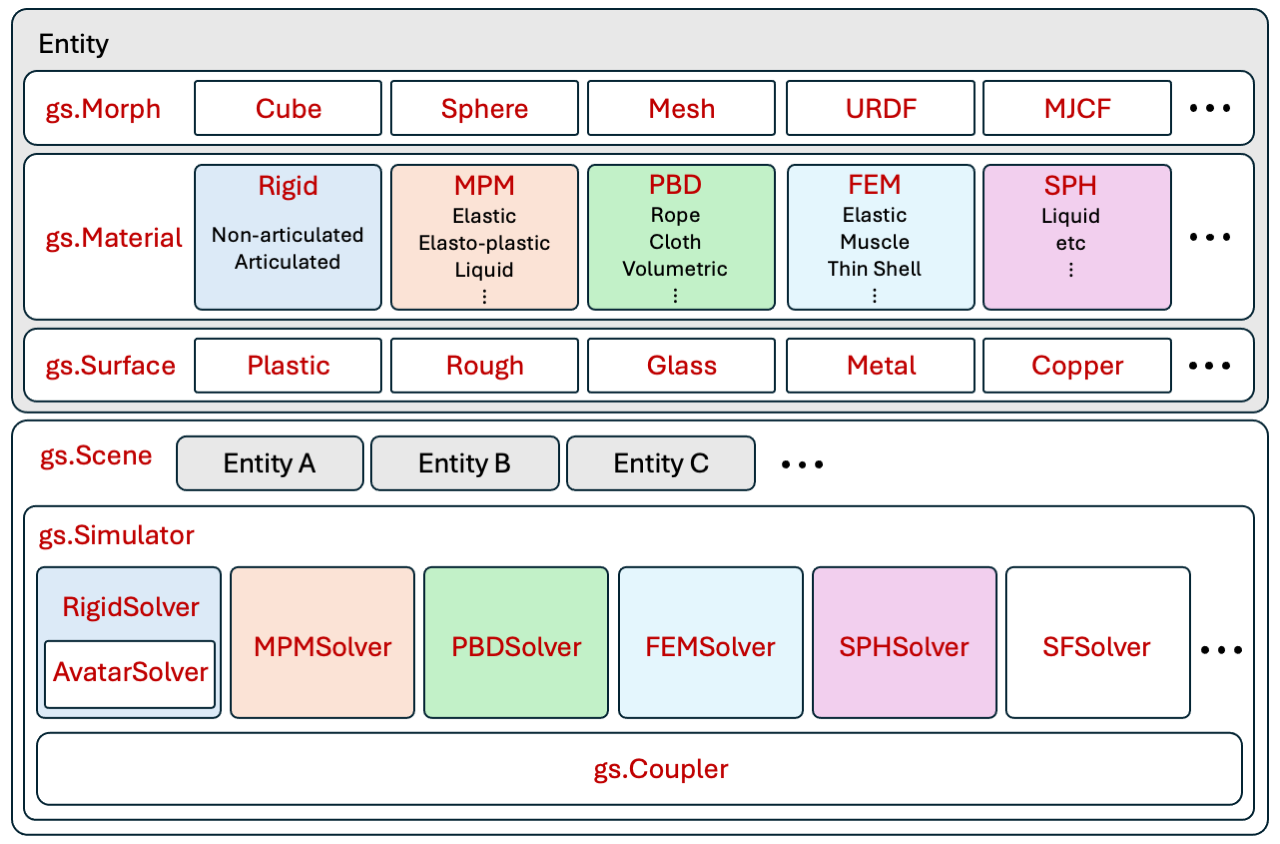
从用户的角度来看,在 Genesis 中构建环境涉及向 Scene 添加 Entity 对象。每个 Entity 由以下部分定义:
Morph:实体的几何形状,例如基本形状(如立方体、球体)或关节模型(如 URDF、MJCF)。Material:实体的物理属性,例如弹性固体、液体或颗粒材料。材料类型决定了所使用的底层求解器——例如,MPM 和 SPH 都可以仿真液体,但各自表现出不同的行为。Surface:视觉和交互相关的表面属性,例如纹理、粗糙度或反射率。
在幕后,Scene 由 Simulator 提供支持,其中包括:
Solver:核心物理求解器,负责仿真不同的物理模型,例如刚体动力学、物质点法(MPM)、有限元法(FEM)、基于位置的动力学(PBD)和光滑粒子流体动力学(SPH)。Coupler:处理求解器之间交互的模块,确保一致的力耦合和实体间动力学。
数据索引#
我们收到了很多关于如何部分操作刚体实体的问题,例如仅控制或检索某些属性。因此,我们认为有必要对数据索引访问进行更深入的解释。
结构化数据字段。在大多数情况下,我们使用 struct Quadrants field。以 MPM 为例进行更好的说明(此处 和 此处):
struct_particle_state_render = qd.types.struct(
pos=gs.qd_vec3,
vel=gs.qd_vec3,
active=gs.qd_int,
)
...
self.particles_render = struct_particle_state_render.field(
shape=self._n_particles, needs_grad=False, layout=qd.Layout.SOA
)
这意味着我们正在创建一个巨大的”数组”(在 Quadrants 中称为 field),其中每个条目都是一个结构化数据类型,包含 pos、vel 和 active。注意,这个数据字段的长度是 n_particles,包含场景中的 所有 粒子。那么,假设场景中有多个实体,我们如何区分不同的实体呢?一个直接的想法是用相应的实体 ID “标记” 数据字段的每个条目。然而,从内存布局、计算和 I/O 的角度来看,这可能不是最佳实践。相反,我们使用索引偏移来区分实体。
局部索引和全局索引。索引偏移同时提供了简单直观的用户界面(局部索引)和优化的底层实现(全局索引)。局部索引允许在实体 内部 进行交互,例如特定实体的第 1 个关节或第 30 个粒子。全局索引是直接指向求解器内部数据字段的指针,考虑了场景中的所有实体。视觉示意如下:

我们在下面提供了一些具体示例以便更好地理解:
在 MPM 仿真中,假设
vel=torch.zeros((mpm_entity.n_particles, 3))(仅考虑 该 实体的所有粒子),mpm_entity.set_velocity(vel)自动抽象出全局索引的偏移。在底层,Genesis 实际上在做类似mpm_solver.particles[start:end].vel = vel的操作,其中start是偏移量(mpm_entity.particle_start),end是偏移量加上粒子数量(mpm_entity.particle_end)。在刚体仿真中,所有
*_idx_local都表示局部索引,用户通过它们进行交互。它们将通过entity.*_start + *_idx_local转换为全局索引。假设我们想通过rigid_entity.get_dofs_position(dofs_idx_local=[2])获取第 3 个自由度的位置,这实际上是在访问rigid_solver.dofs_state[2+offset].pos,其中offset是rigid_entity.dofs_start。
(关于相关设计模式 实体组件系统 (ECS) 的有趣阅读)
直接访问数据字段#
通常,我们不鼓励用户直接访问(Quadrants)数据字段。
相反,用户应该主要使用每个实体中的 API,例如 RigidEntity.get_dofs_position。
但是,如果有人想访问 API 不支持的数据字段,并且无法等待新的 API 支持,可以尝试直接访问数据字段,这可能是一个快速但(很可能)低效的解决方案。具体来说,按照上一节描述的数据索引机制,假设有人想这样做:
entity: RigidEntity = ...
tgt = entity.get_dofs_position(...)
这等价于:
all_dofs_pos = entity.solver.dofs_state.pos.to_torch()
tgt = all_dofs_pos[:, entity.dof_start:entity.dof_end] # 第一个维度是批次维度
所有实体都与特定的求解器相关联(混合实体除外)。
每个所需的物理属性都存储在求解器中的某个位置(例如,这里的自由度位置存储在刚体求解器的 dofs_state.pos 中)。
有关这些映射的更多详细信息,您可以查看 命名与变量。
此外,求解器中的所有数据字段都遵循全局索引(针对所有实体),您需要 entity.*_start 和 entity.*_end 来仅提取与特定实体相关的数据。