

🧑💻 交互式信息访问与调试#
我们设计了一个信息丰富(希望也很美观)的界面,用于访问内部信息和 Genesis 中创建的所有对象的可用属性,通过所有 Genesis 类的 __repr__() 方法实现。如果您习惯使用 IPython、pdb 或 ipdb 进行调试,这个功能将非常有用。
在本例中使用 IPython。如果没有安装,请通过 pip install ipython 安装。这里让我们通过一个简单的例子来说明:
import genesis as gs
gs.init()
scene = gs.Scene(show_viewer=False)
plane = scene.add_entity(gs.morphs.Plane())
franka = scene.add_entity(
gs.morphs.MJCF(file='xml/franka_emika_panda/panda.xml'),
)
cam_0 = scene.add_camera()
scene.build()
# 进入 IPython 交互模式
import IPython; IPython.embed()
您可以直接运行此脚本(如果已安装 IPython),或者在终端中进入 IPython 交互窗口并粘贴这里的代码(不包括最后一行)。
在这个小块代码中,我们添加了一个平面实体和一个 Franka 机械臂。现在,如果您是新手,可能会想知道场景实际包含什么。如果您在 IPython 中(或 ipdb 或 pdb 甚至原生 python shell)简单地输入 scene,您将看到场景中的所有内容,格式化并着色得很好:
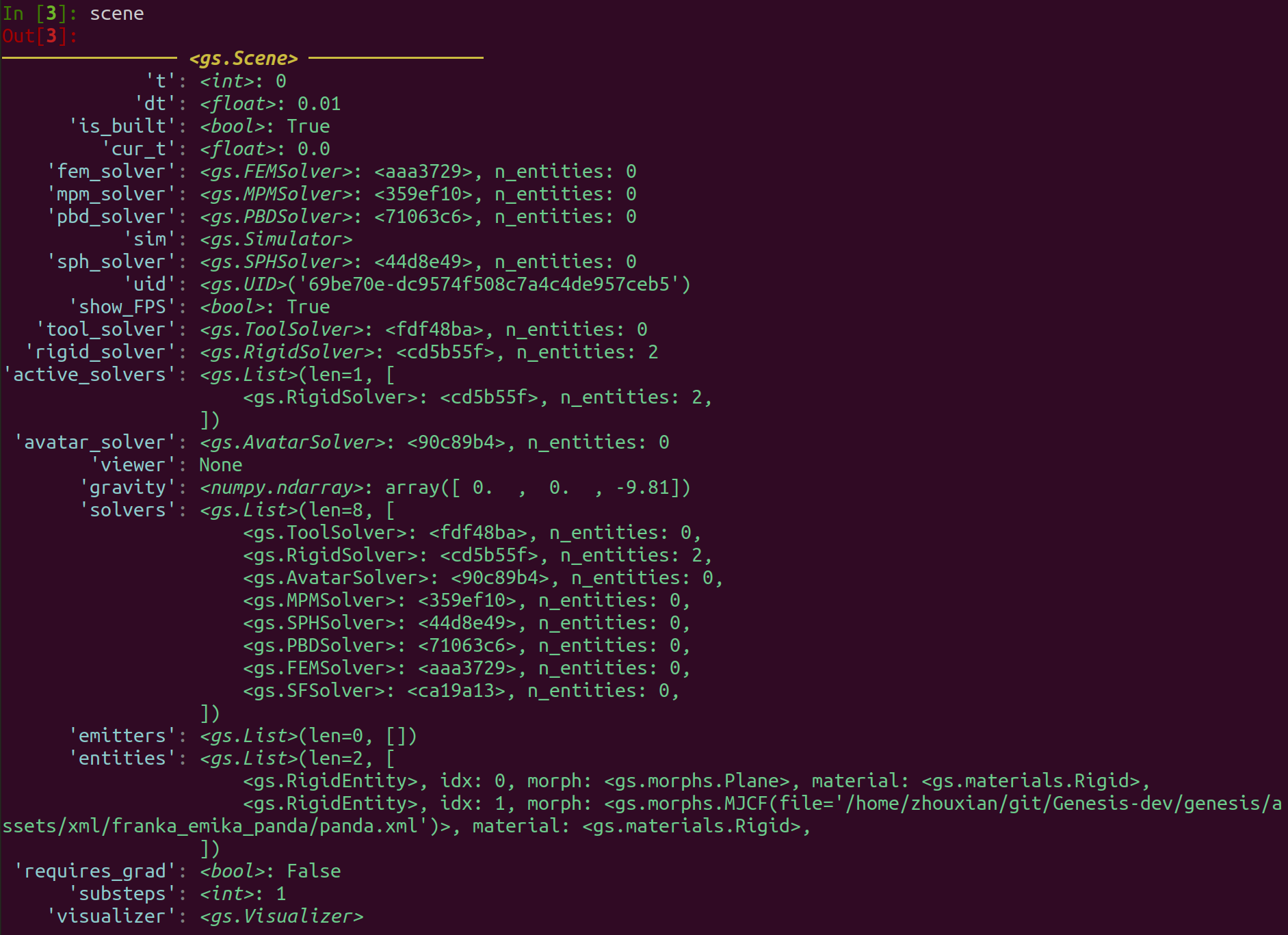
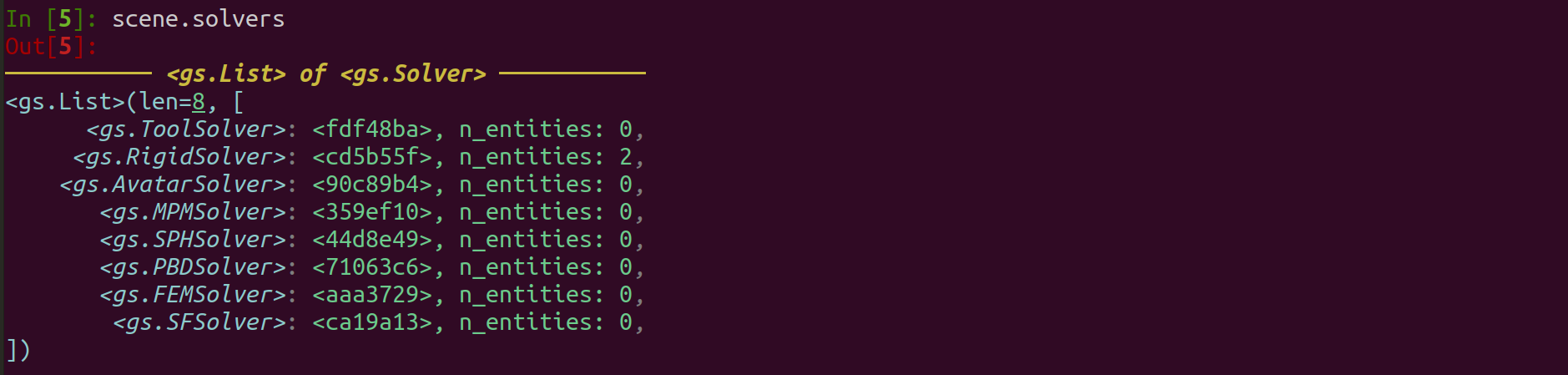
在顶行,您将看到对象的类型(此处为 <gs.Scene>)。然后您将看到其中所有可用的属性。例如,它告诉您场景已构建(is_built 为 True),其时间步长(dt)为值 0.01 秒的浮点数,其唯一 id(uid)为 '69be70e-dc9574f508c7a4c4de957ceb5'。场景还有一个名为 solvers 的属性,本质上是它所拥有的不同物理求解器的列表。您可以在 shell 中进一步输入 scene.solvers 并检查此列表,它使用 gs.List 类实现以获得更好的可视化效果:
您还可以检查 Franka 实体:
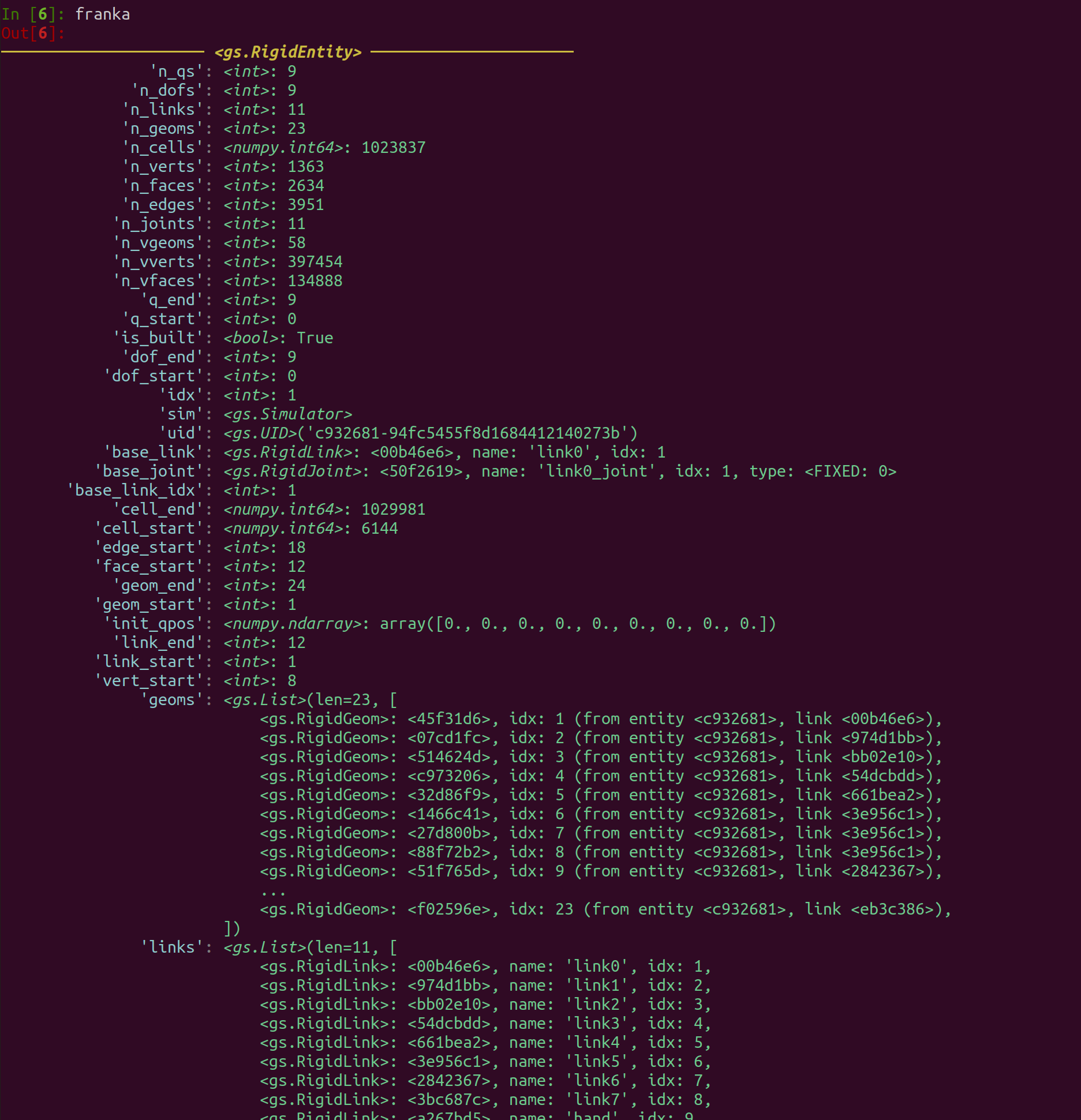
在这里您将看到所有的 geoms、links 以及相关信息。我们可以再深入一层,输入 franka.links[0]:
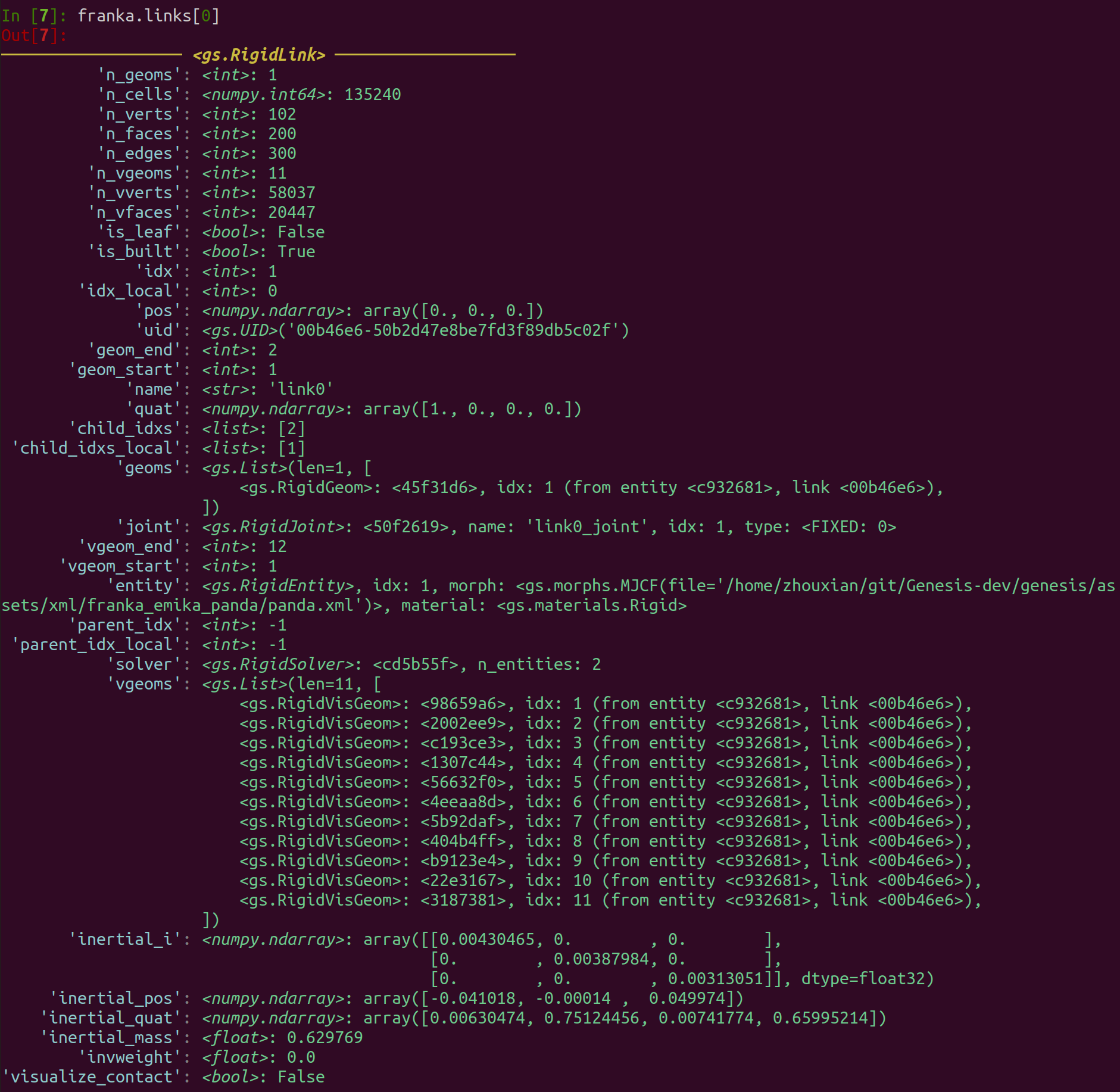
在这里,您将看到 link 中包含的所有碰撞几何体(geoms)和视觉几何体(vgeoms),以及其他重要信息,例如其 inertial_mass、link 在场景中的全局索引(idx)、所属实体(entity,即 franka 机械臂实体)、其关节(joint)等。
我们希望这个信息丰富的界面能让您的调试过程更轻松!