

✍️ 两阶段训练的机器人操作#
本示例演示使用两阶段训练范式的机器人操作,结合了强化学习(RL)和模仿学习(IL)。核心思想是首先使用完整状态信息训练一个特权教师策略,然后将该知识蒸馏到一个基于视觉的学生策略中,该策略依赖于相机观测(以及可选的机器人本体感知)。 这种方法能够在仿真中实现高效学习,同时缩小向真实世界部署的差距,因为在真实世界中特权状态是不可用的。
环境概述#
操作环境由以下元素组成:
机器人: 一个带平行夹爪的 7-DoF Franka Panda 机械臂。
物体: 一个具有随机初始位置和方向的盒子,确保多样化的训练场景。
相机: 两个面向操作场景的立体 RGB 相机(左和右)。这里,我们使用 Madrona Engine 进行批量渲染。
观测值:
特权状态: 末端执行器位姿和物体位姿(仅在教师训练期间使用)。
视觉状态: 立体 RGB 图像(由学生策略使用)。
动作: 6-DoF 增量末端执行器位姿命令(3D 位置 + 方向)。
奖励: 使用关键点对齐奖励。这定义了夹爪和物体之间的参考关键点,鼓励夹爪对齐到可抓取姿态。
这种表述避免了密集的塑形项,直接编码任务成功。
策略学习到达目标只需要这个奖励。
RL 训练(第一阶段:教师策略)#
在第一阶段,我们使用 RSL-RL 库 中的 近端策略优化(PPO) 训练教师策略。
设置:
pip install tensorboard "rsl-rl-lib>=5.0.0"
训练:
python examples/manipulation/grasp_train.py --stage=rl
监控:
tensorboard --logdir=logs
如果训练成功,奖励学习曲线如下所示:
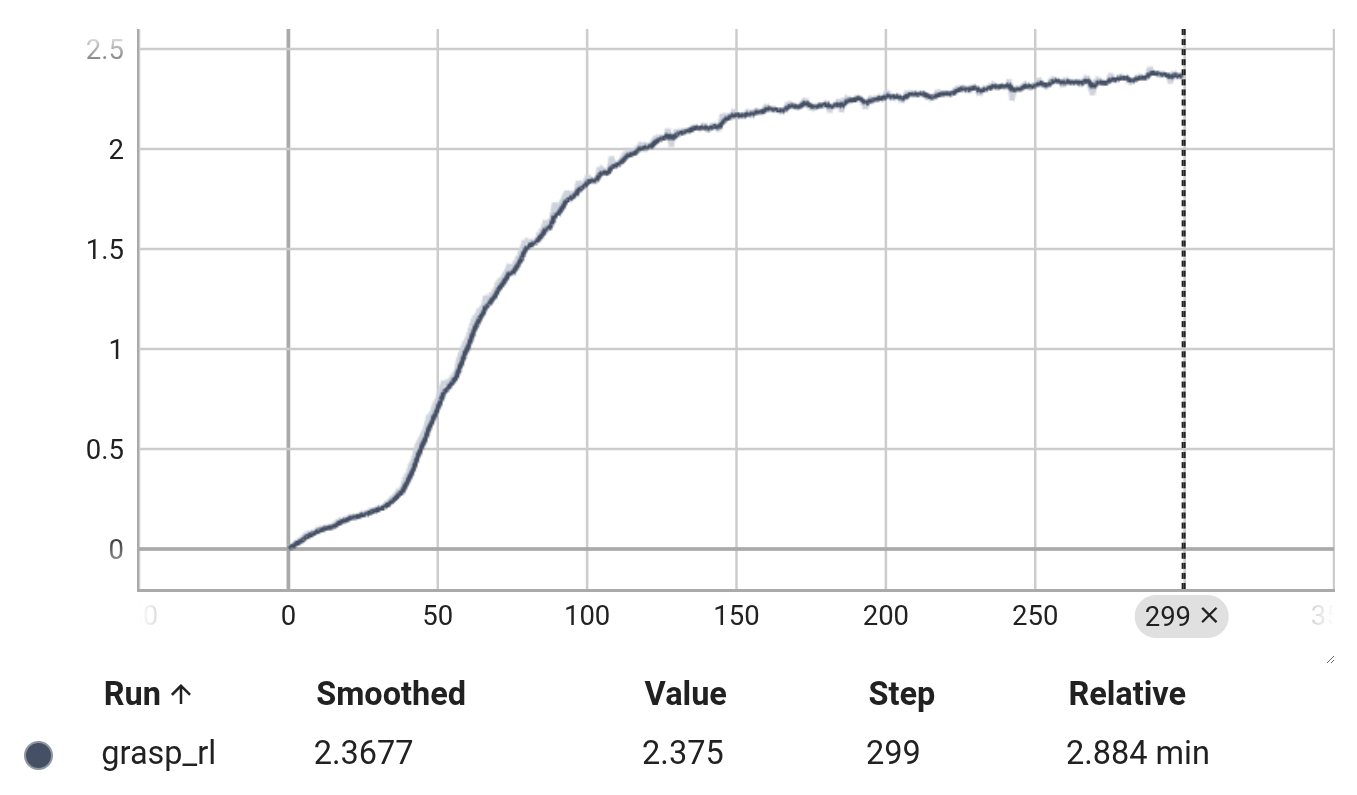
关键细节:
输入: 特权状态(无图像)。
输出: 末端执行器动作命令。
并行化: 大批量向量化的 rollout(例如,1024-4096 个环境)以实现快速吞吐。
奖励设计: 关键点对齐足以产生一致的抓取行为。
结果: 一个轻量级 MLP 策略,能够利用真实状态信息学习稳定的抓取行为。
教师策略作为下一阶段的演示源。
模仿学习(第二阶段:学生策略)#
第二阶段训练一个视觉条件化的学生策略,该策略模仿 RL 教师。
架构:
编码器: 共享的立体 CNN 编码器提取视觉特征。
融合网络: 将图像特征与可选的机器人本体感知合并。
头:
动作头: 预测 6-DoF 操作动作。
位姿头: 预测物体位姿(xyz + 四元数)的辅助任务。
训练目标:
损失:
动作 MSE(学生 vs 教师)。
位姿损失 = 位置 MSE + 四元数距离。
数据收集: 教师提供在线监督,可选择使用 DAgger 风格的修正来减轻协变量偏移。
结果: 一个仅视觉的策略,能够在不访问特权状态的情况下泛化抓取行为。
运行训练:
python examples/manipulation/grasp_train.py --stage=bc
评估#
教师策略和学生策略都可以在仿真中进行评估(有或没有可视化)。
教师策略(MLP):
python examples/manipulation/grasp_eval.py --stage=rl
学生策略(CNN+MLP):
python examples/manipulation/grasp_eval.py --stage=bc --record
学生通过 Madrona 渲染的立体相机观察环境。
日志与监控:
指标记录在 TensorBoard 中(
logs/grasp_rl/或logs/grasp_bc/)。RL 和 BC 阶段都有定期检查点。
总结#
这个两阶段流程说明了一个实用的机器人操作策略:
教师策略(RL): 使用完整信息进行高效学习。
学生策略(IL): 从演示中蒸馏出的基于视觉的控制。
最终得到一个样本高效且对真实感知输入具有鲁棒性的策略。